
Referenzen
Sondermaschinenbau
Handhabungsgerät zur Entnahme unterschiedlich großer Silizium Kristalle direkt aus dem Ofen.




Modalanalyse am Ringmotor (Durchmesser 20 m, Eigengewicht 480 Tonnen) in Penasquito, Mexiko (Hochebene in der Wüste in über 2000m).
Beim damals weltweit größten Elektromotor sollte die FEM-Berechnung mit einem Versuch am realen Motor abgesichert werden.





Reinraum
Reinraumtrolleys mit verschiedenen Adaptionen zum Heben, Platzieren und Manövrieren von verschiedenen kundenspezifischen Produkten im Reinraum.





Luft- und Raumfahrt
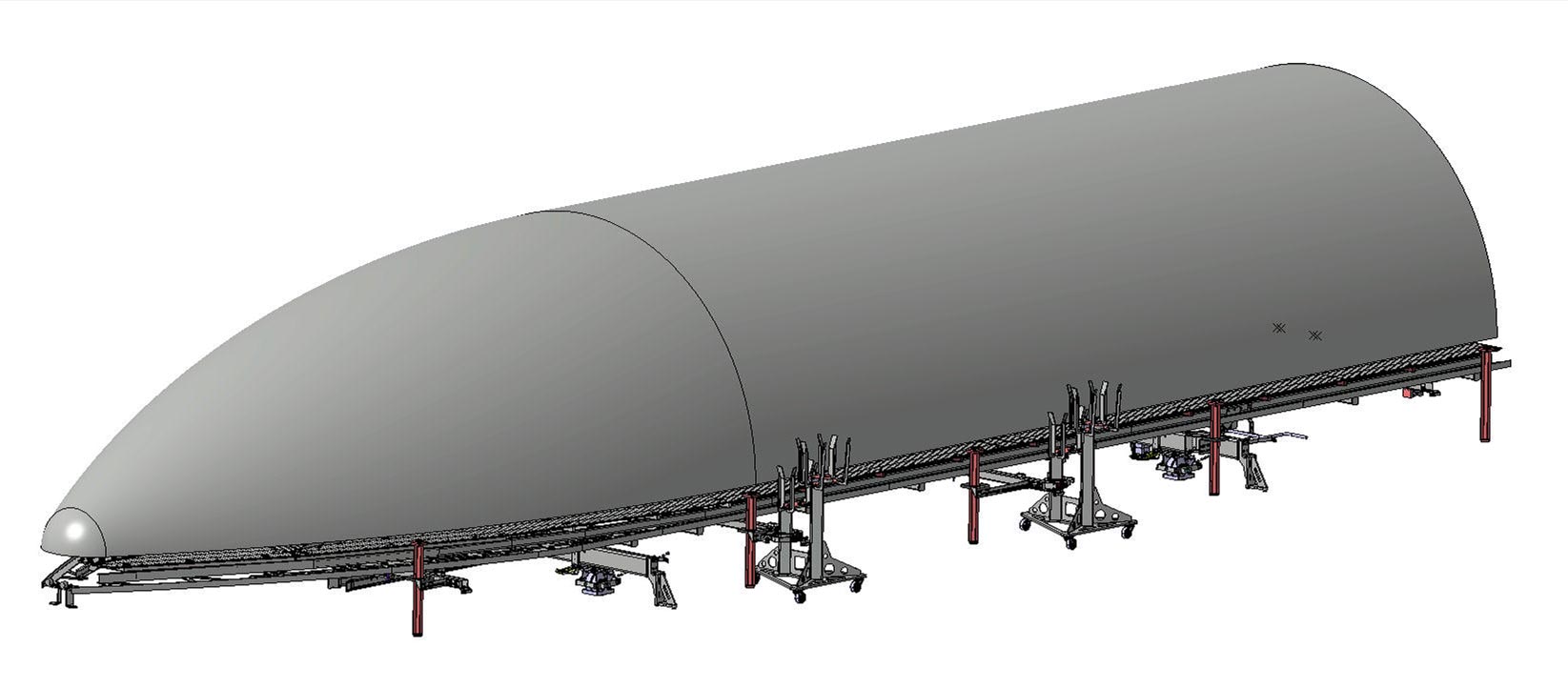
Auf Vakuumtechnik basierende Handhabungsvorrichtungen für ogiven- und zylinderförmige Segmente der Nutzlastverkleidung der europäischen Trägerrakete Vega (ESA).


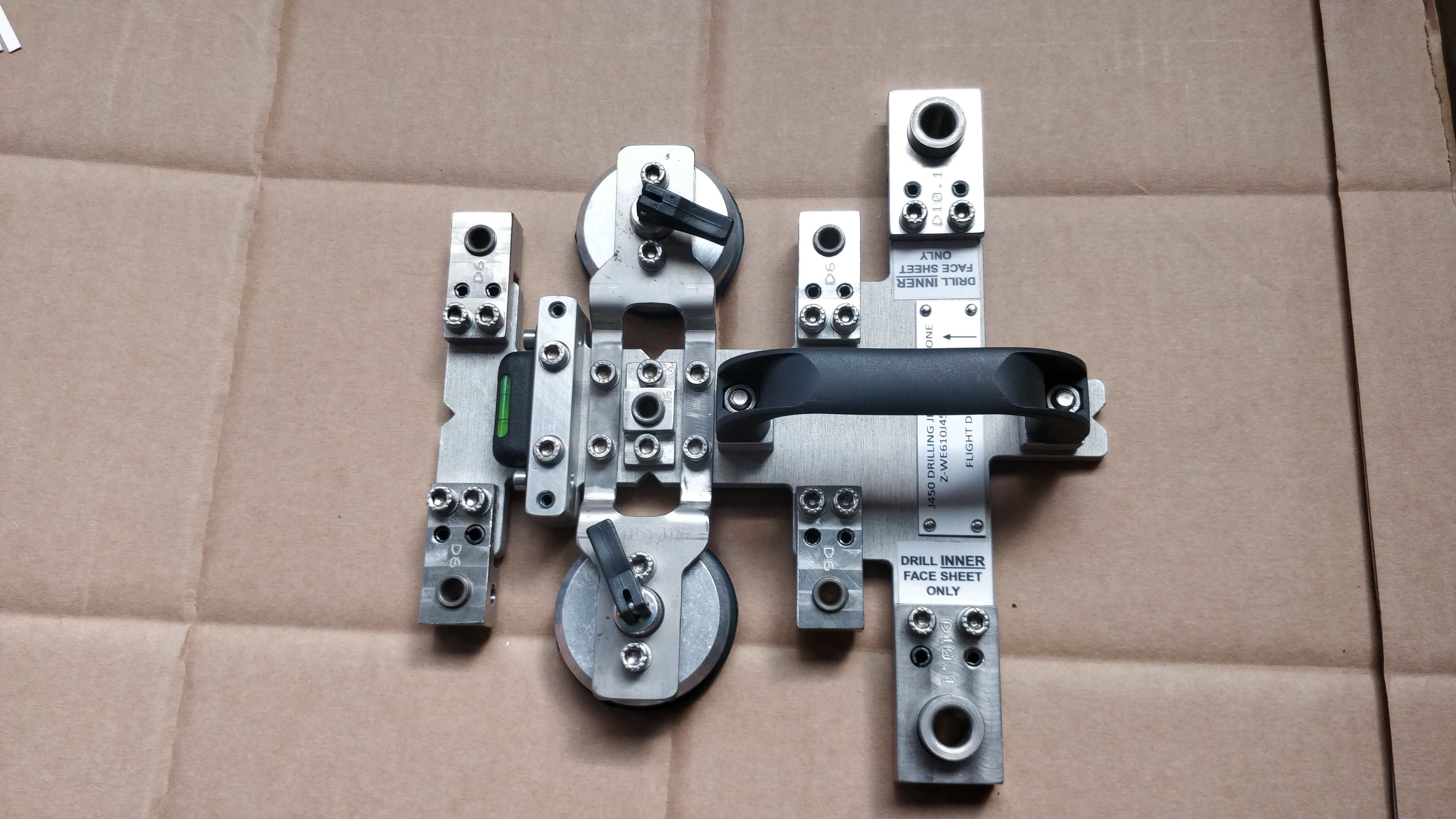
Manuelle Vorrichtung mit lufthydraulischen Bohrvorschubeinheiten für positionsgenaues Anbringen von Lochbildern entlang der Nutzlastverkleidungen der europäischen Trägerrakete Vega (ESA).







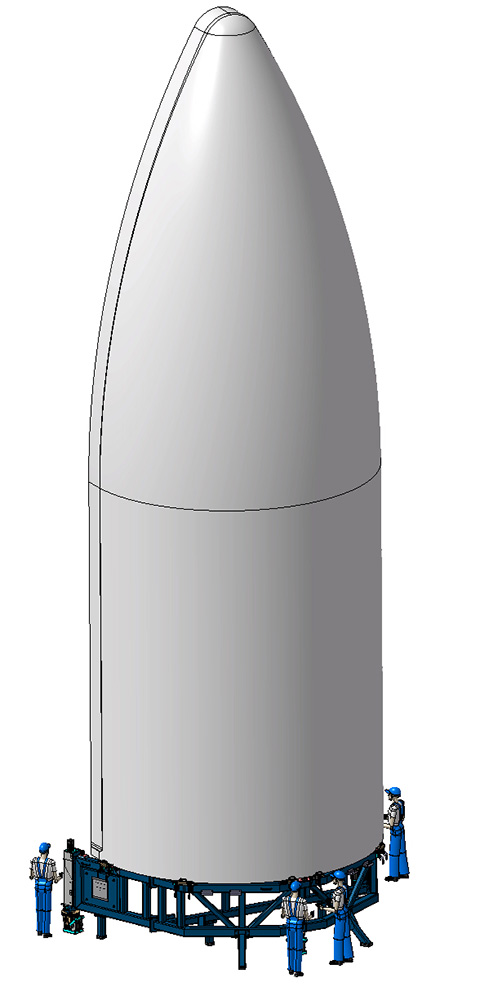
Handhabungsvorrichtungen für das Fügen der Nutzlastspitzen der europäischen Trägerrakete Vega (ESA) für den Weltraumbahnhof Kourou in Französisch-Guayana.



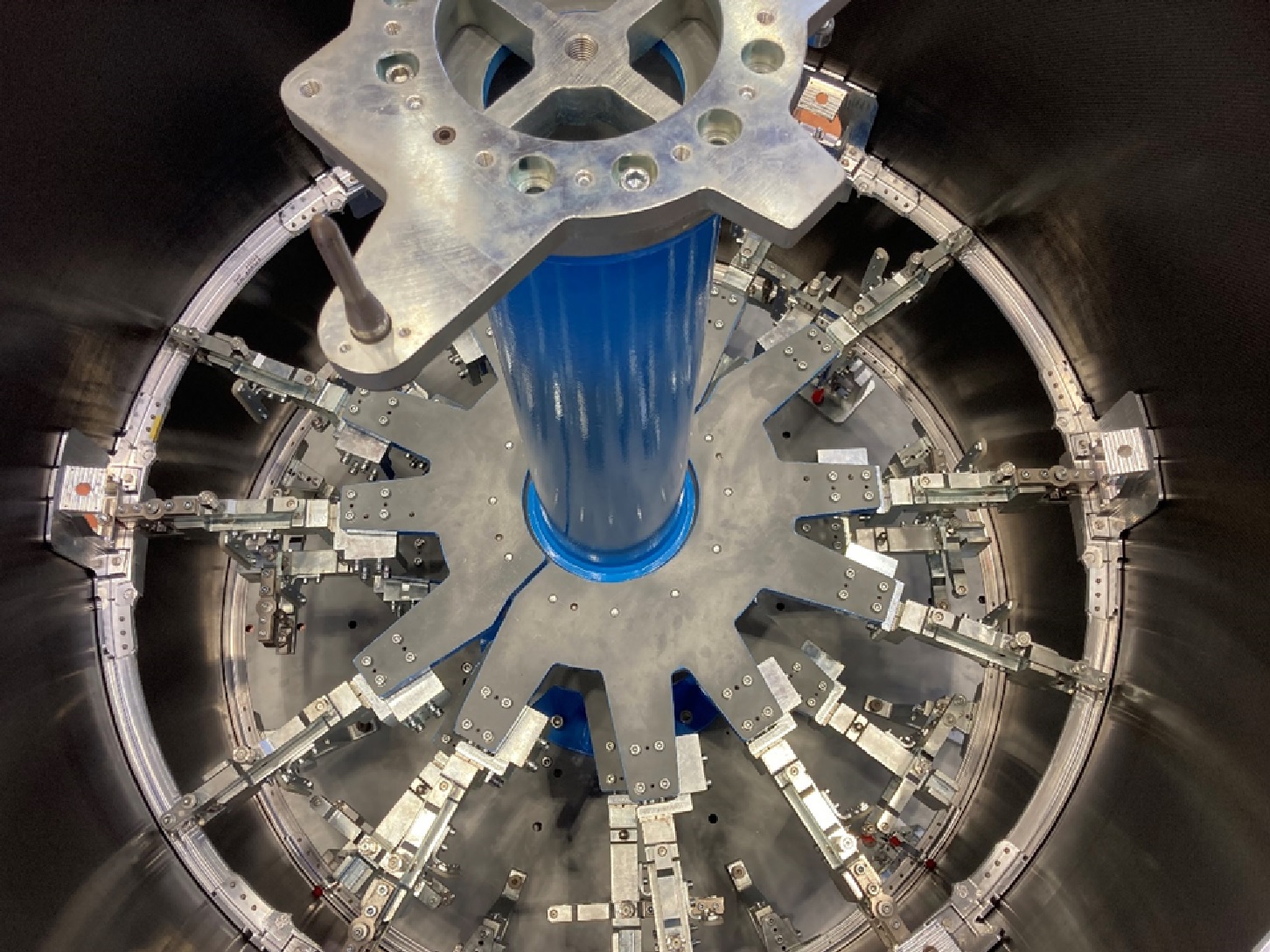
Vorrichtung für halbautomatisches Bohren und Bearbeiten der ISA-Struktur von Trägerraketen für Kleinsatelliten (small launcher). Die Anlage ist multiflexibel für unterschiedliche Durchmesser. Verschiedene Raketenlängen sind in einem Werkzeugkasten als Baukastensystem herstellbar. Die Bohrungs-Positionen können frei programmierbar angefahren und getaktet werden.







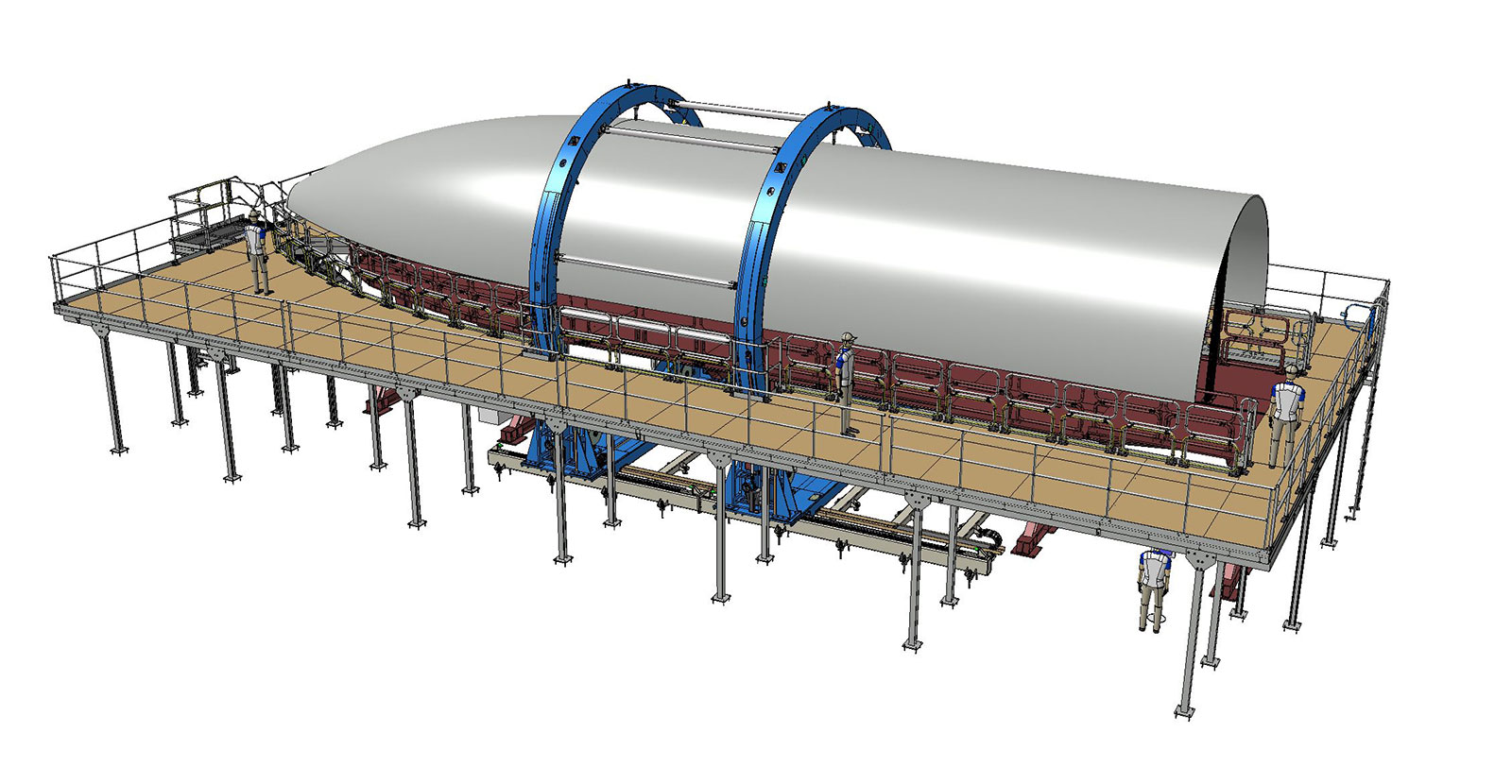
Drehvorrichtung und Arbeitsplattformen für Montagearbeiten an Nutzlastverkleidungen der US-amerikanischen Trägerrakete Atlas (ULA).









Lackier- ,Transport- und Übergabewagen für Nutzlastverkleidungen der US-amerikanischen Trägerrakete Atlas (ULA).



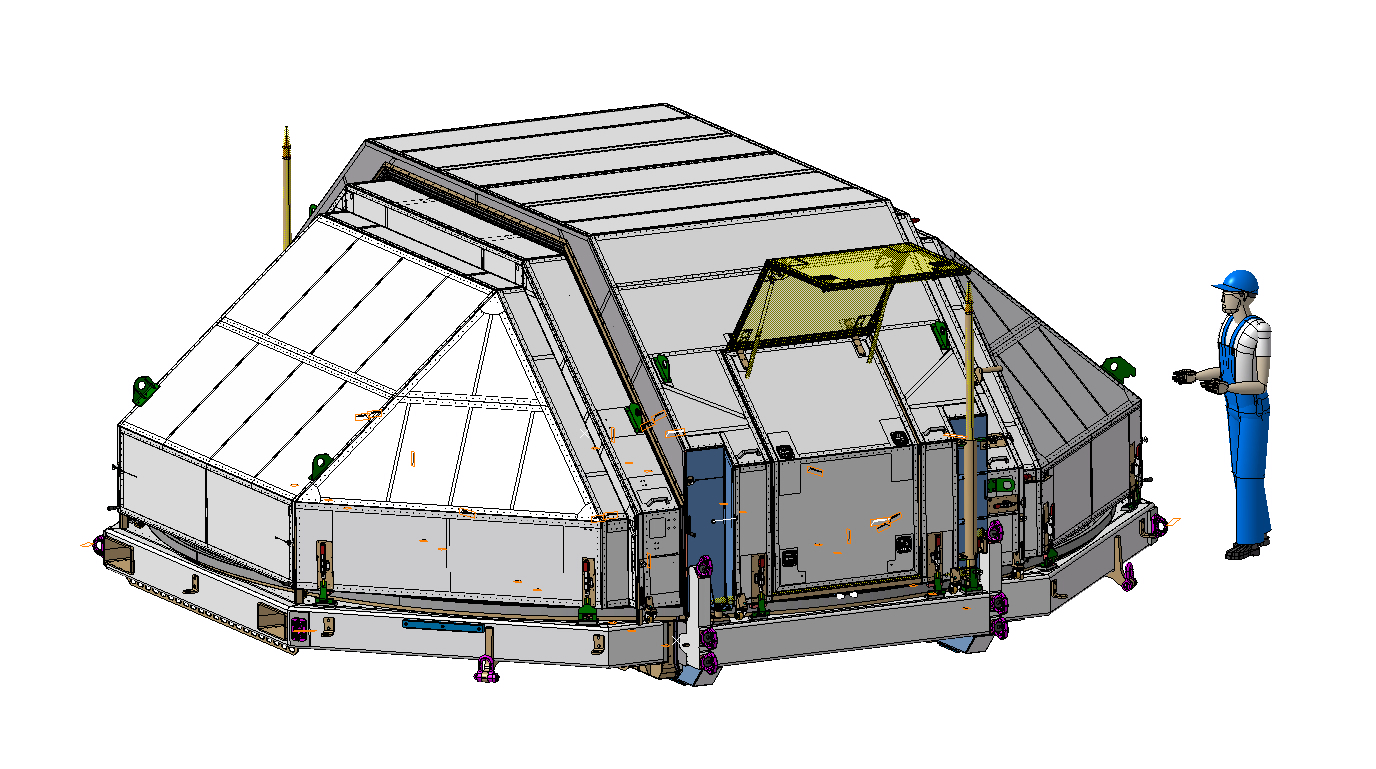
Zwei Stück Strongbacks für die Nutzlastverkleidung (PLF) der US-amerikanischen Trägerrakete Vulcan.
Die Strongbacks (Höhe 15m, Ø 6m) sind für den Transport der Nutzlastverkleidungen sowie für das Zusammenfahren der beiden Nutzlastverkleidungen mit dem Satelliten für Cape Canaveral Space Force Station und Vandenberg Space Force Base.
















Strongbacks für die Nutzlastverkleidung (PLF) der japanischen Trägerrakete H3. Die Strongbacks (Höhe 10m, Ø 6m) sind für den Transport der Nutzlastverkleidungen sowie für das Zusammenfahren der beiden Nutzlastverkleidungen mit dem Satelliten für Tanegashima Space Center in Japan.










Vier OSHA konforme Personenplattformen (Ø jeweils 5m) für die Installation von Testequipment in der Vulcan Nutzlastspitze am Marshall Space Flight Center der NASA in Huntsville, USA.






















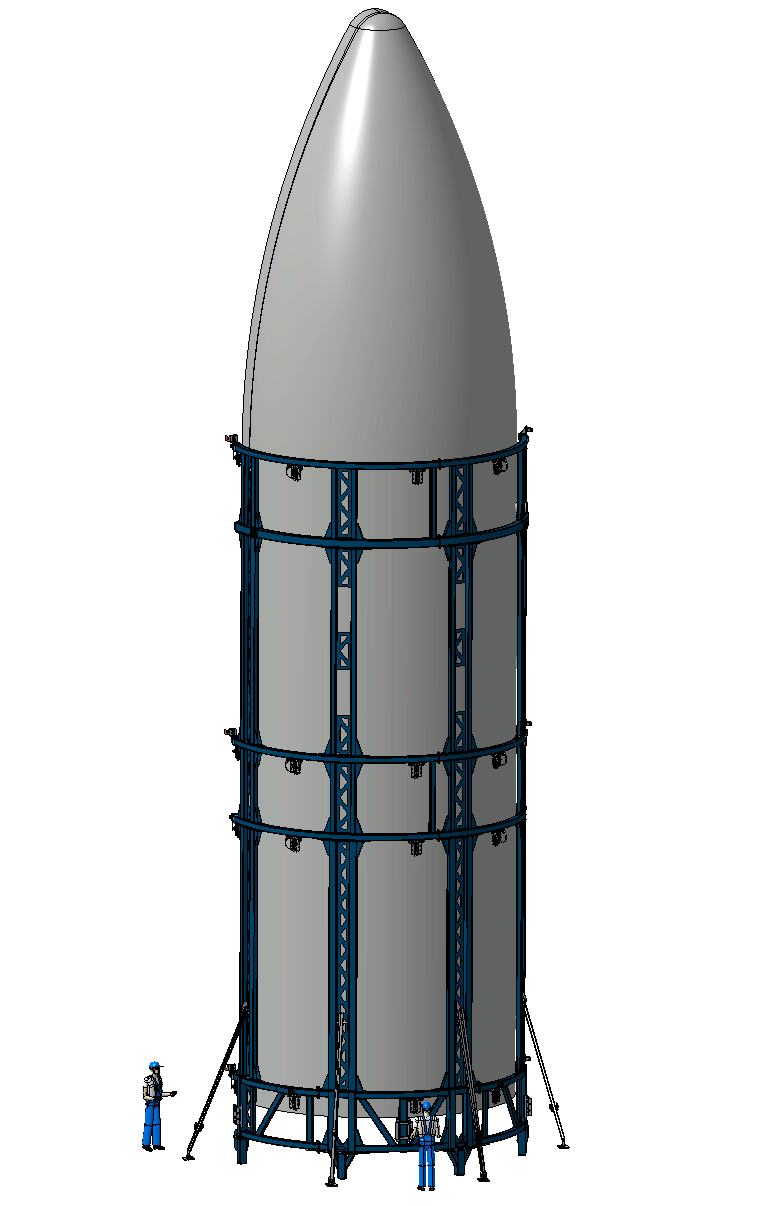
Fahrbare Vorrichtung zum sicheren Aufrichten, Transportieren, exakten Positionieren und Lagern von Nutzlastspitzen der US-amerikanischen Trägerrakete Vulcan für den Standort Cape Canaveral.






Manuell bedienbare Arbeitsplattform (7,2x4x7,5 m, LxBxH) mit Zwangskinematik für sicheres (kollisionsfreies) Lackieren verschiedener Strukturbauteile der US-amerikanischen Trägerrakete Atlas (ULA).





Verschiedene Ablagen und Vorrichtungen für die Wende- und Handlingsvorgänge unterschiedlichster Strukturbauteile der US-amerikanischen Trägerrakete Atlas (ULA).



















Transportsystem für den Luft-, See- und Überlandtransport von Strukturbauteilen der US-amerikanischen Trägerrakete Atlas, klappbar auf ISO-Containermaße für kosten- und zeitoptimierten Transport, Handhabung und Lagerung der leeren Paletten.














Hardcover und Softcover für den Luft-, See- und Überlandtransport von Strukturbauteilen der US-amerikanischen Trägerrakete Atlas (ULA). Das Hardcover besteht aus einer geschweißten Stahlkonstruktion. Das aus LKW-Planen erstellte Softcover hat integrierte Schläuche die zur Aussteifung der abzudeckenden Bauteilstrukturen mit Druckluft gefüllt werden.














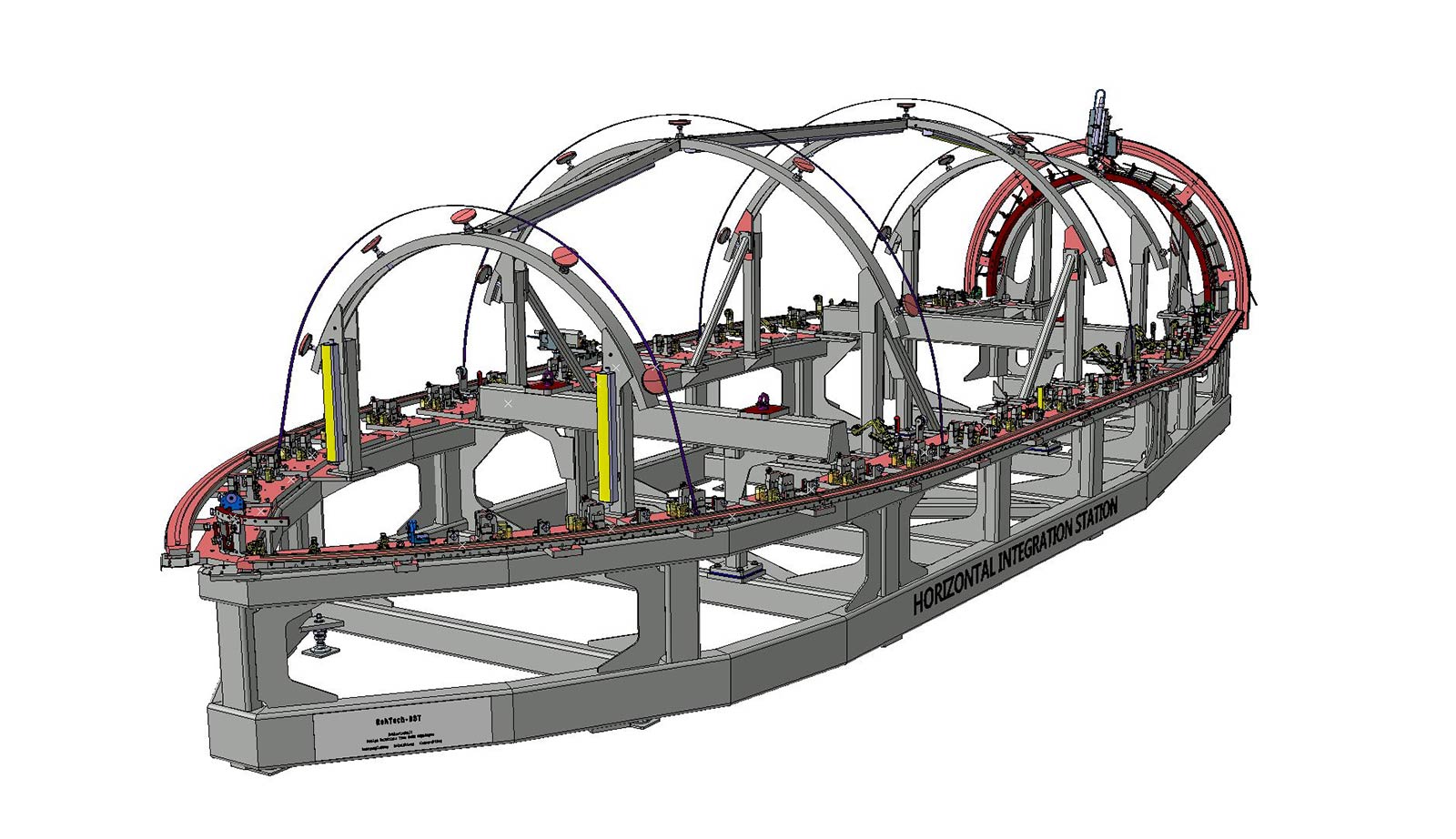
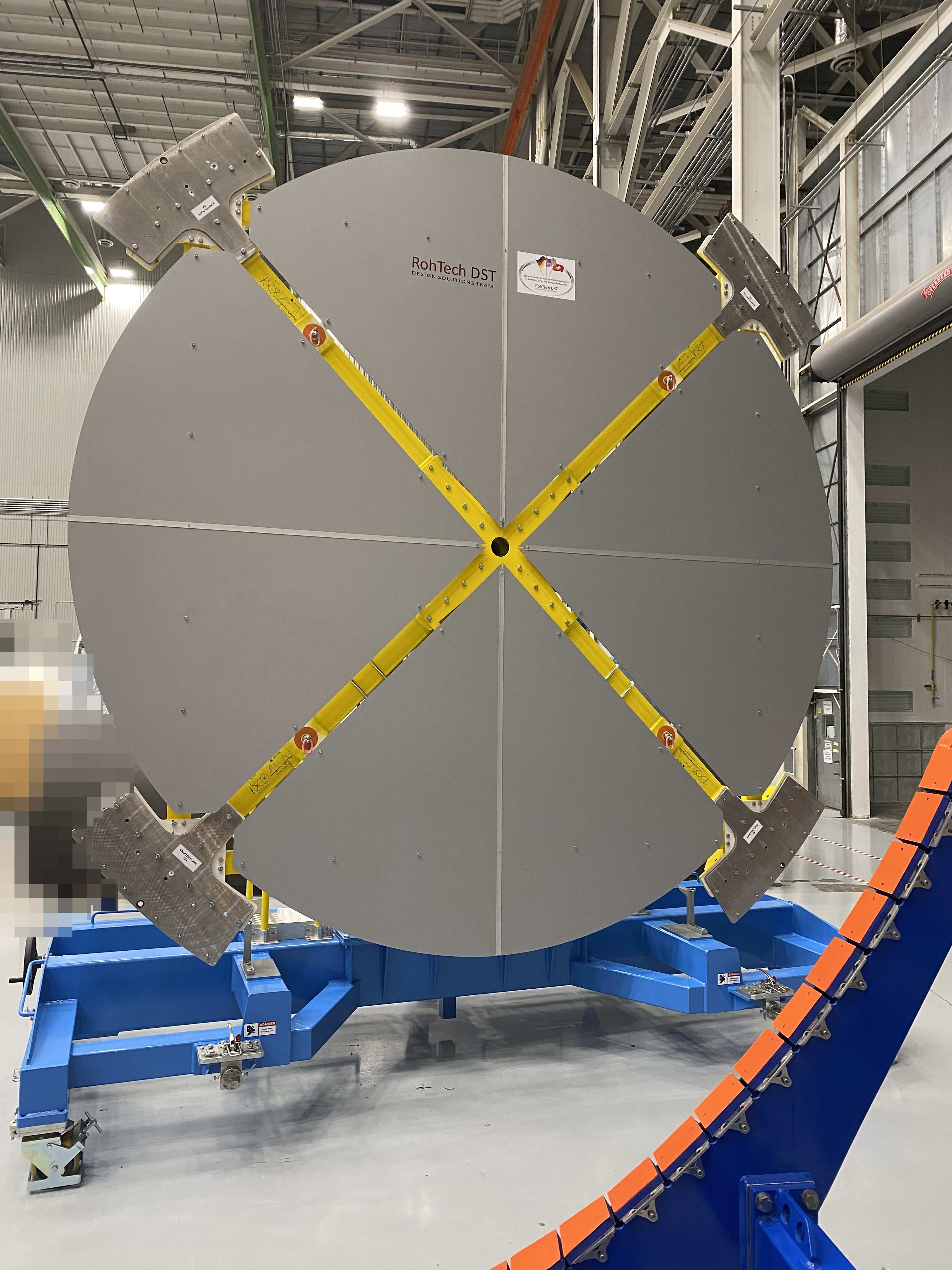
Vorrichtung für positionsgenaues Anbringen von Lochbildern und Fügen der PAF Struktur zusammen mit dem Horizontal Integrationssystem der US-amerikanischen Trägerrakete Vulcan. Bei der PAF handelt es sich um die Struktur, die den Satellit aufnimmt.




Fahrbare Vorrichtung für die Montage des Heatshield an der US-amerikanischen Trägerrakete Atlas (ULA). Beim Heatshield handelt es sich um ein Cover der Raketenmotoren.



Arbeitsplattform im Baukastensystem zum Montieren in der ISA Struktur und im Heatshield um Arbeiten im inneren der ISA Struktur/des Heatshield der US-amerikanischen Trägerrakete Atlas (ULA) vorzunehmen. Die Plattform wird seitlich an der ISA Struktur/am Heatshield freihängend befestigt. Es gibt 3 verschiedene Varianten der Plattformen, das max. Gewicht der Einzelteile beträgt 14,5 kg und der max. Durchhang ist 8,5 mm.













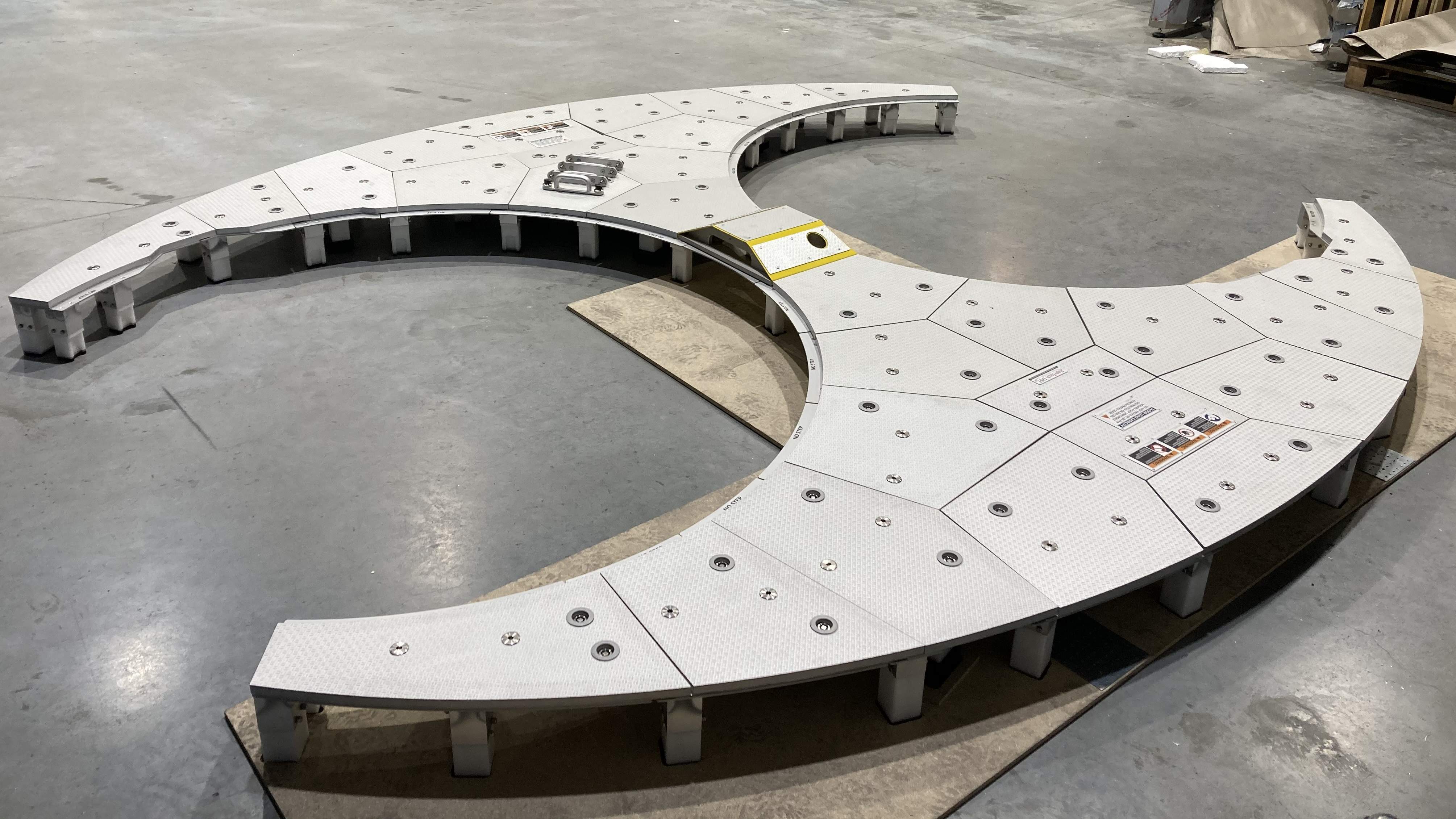


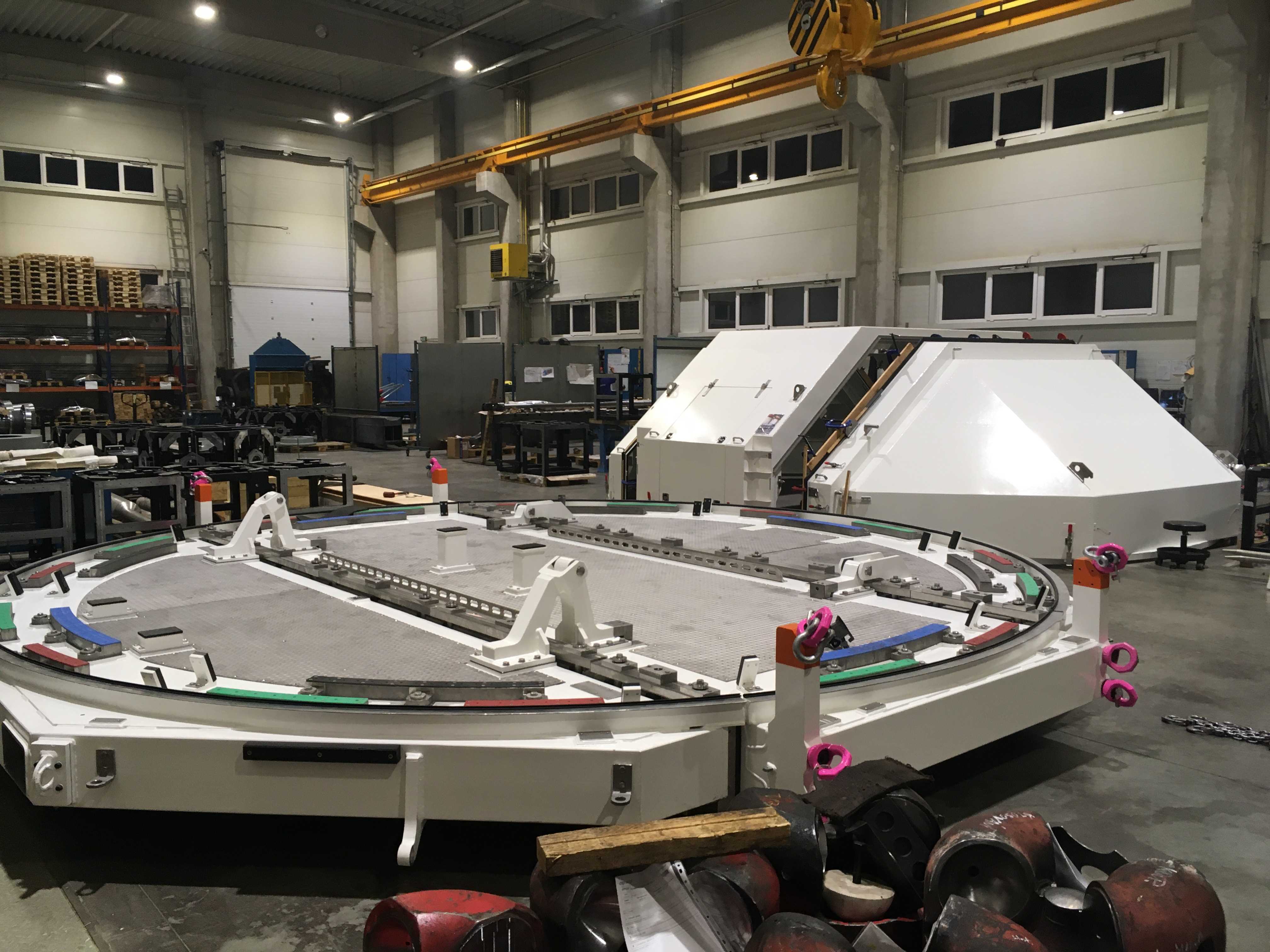
Drehbare Zugangsplattform für die Mold der US-amerikanischen Trägerrakete Vulcan. Auf der Mold werden Verbund-Sandwich-Strukturen für die Flughardware PAF Dome erstellt. Die Zugangsplattform ist fest mit der Mold verbunden, in einer Schiene geführt und kann dadurch mit einer Person 360° um die Mold rotiert werden.










Bohrschablonen zum händischen Bohren von Bohrbildern der US-amerikanischen Trägerrakete Atlas (ULA).






Um die Zugangsöffnungen der Flughardware der US-amerikanischen Trägerrakete Vulcan während des Transports vom Herstellerwerk zum Weltraumbahnhof gegen witterungsbedingte Einflüsse zu schützen, werden die Zugangsöffnungen mit sogenannten GSE-Doors aus rot-eloxierten Aluminium geschlossen.









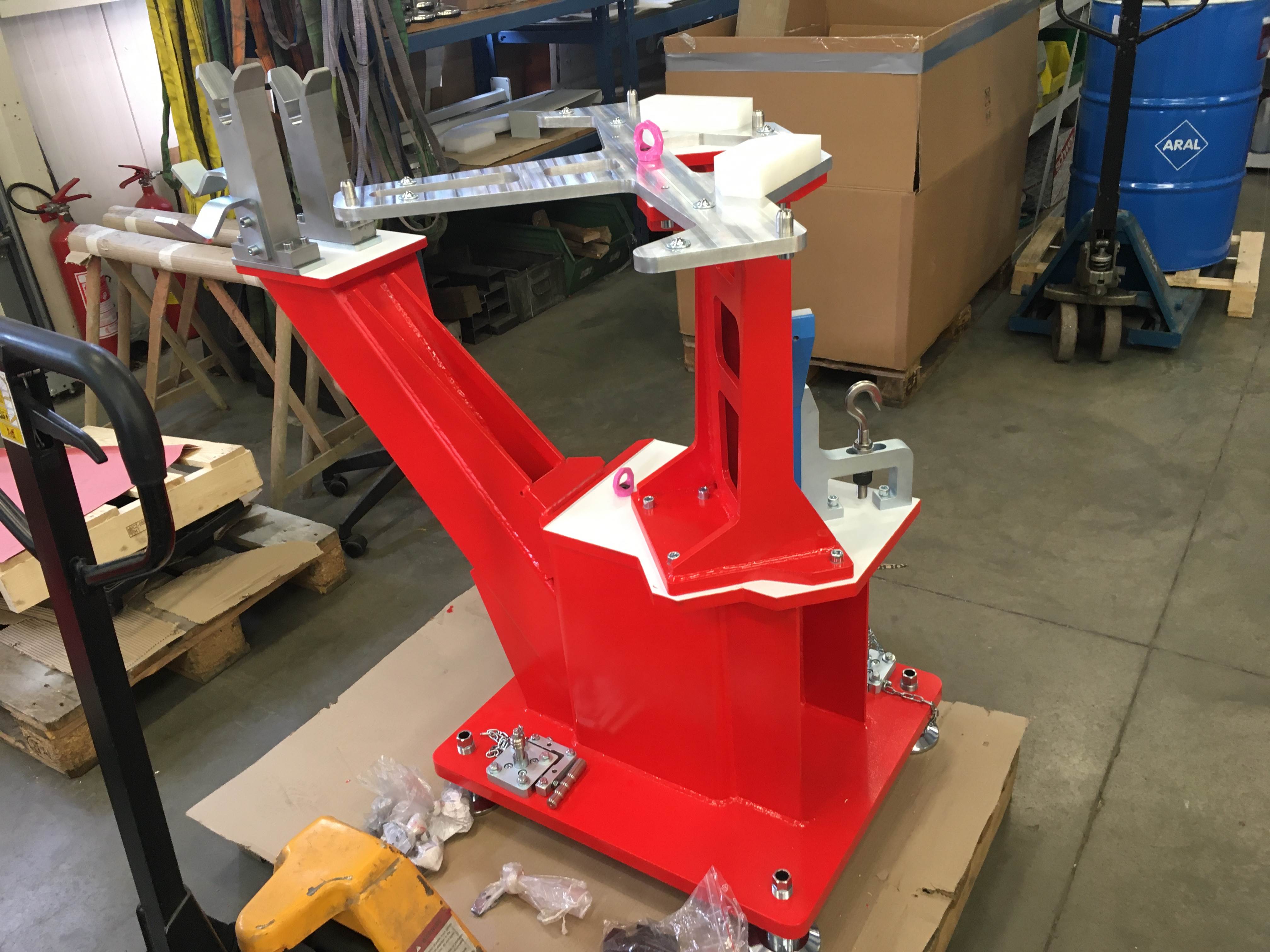
Lastaufnahmemittel zur Entnahme der Heatshield Carbonstruktur aus der Mold Vorrichtung für die US-amerikanische Trägerrakete Vulcan in USA.



Kransysteme zum Wenden der Nutzlastspitze der europäischen Trägerrakete Vega (ESA) aus der Vertikalen in die Horizontale für den Starttisch am Weltraumbahnhof Kourou in Französisch-Guayana.
Kransysteme zum Wenden aller Strukturbauteile aus der Horizontale in die Vertikale für die US-amerikanische Trägerrakete Atlas und Vulcan in USA.










Transportsystem für Segmente des Airbus A350.


Automotive
Anlagenneubau für die Produktion der Rohkarosse für den Unimog.





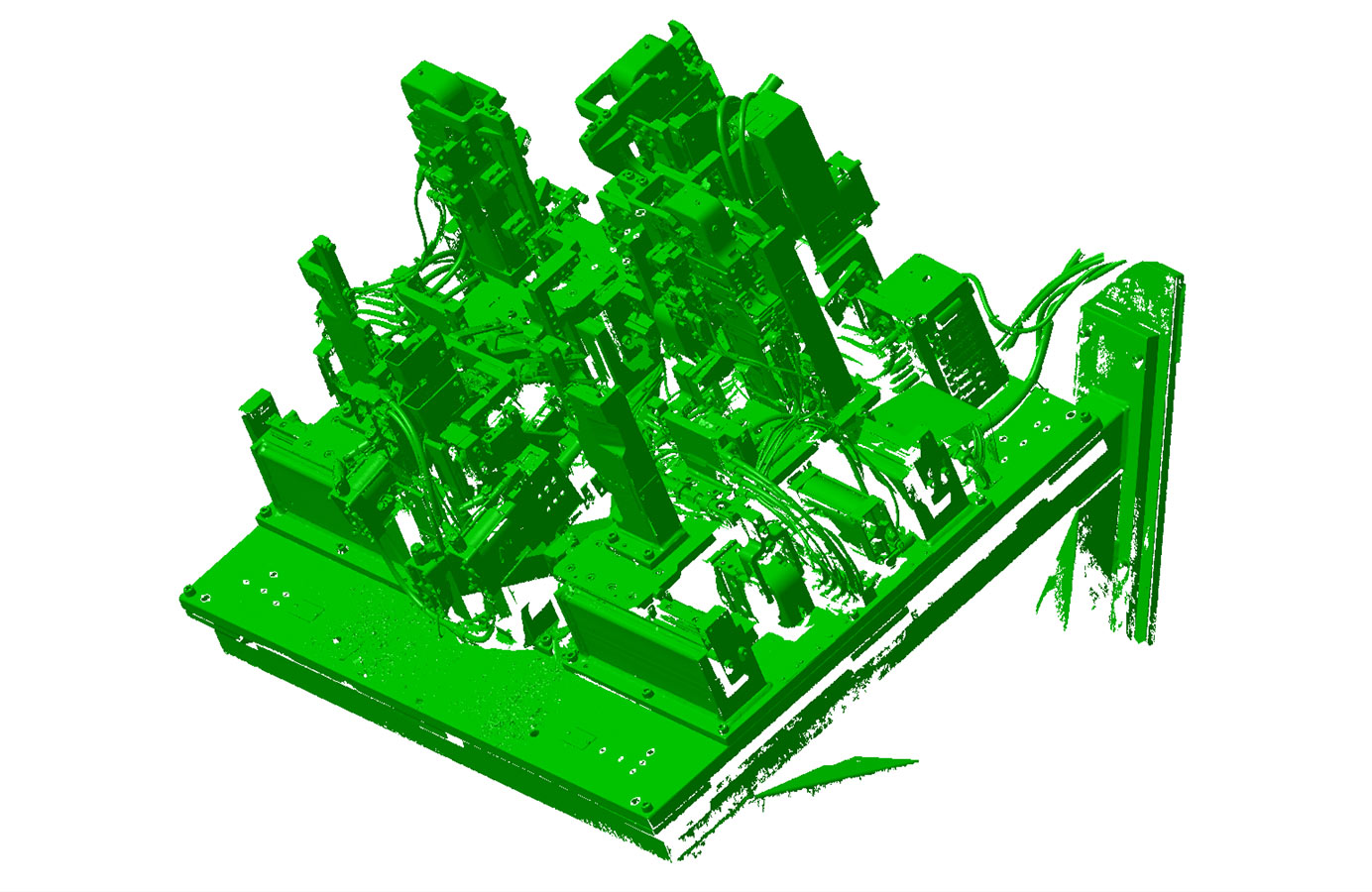
Produktionsanlage für die automatische Fertigung (Roboter) von Sitzkästen für den Sprinter. Von der Altanlage gab es keine Dokumentation. Die Lösung war die Digitalisierung der bestehenden Anlage vor Ort mit Hilfe einer optischen 3D-Vermessung (Scan) in Verbindung mit einer Photogrammetrievermessung. Das Ergebnis war ein komplettes 3D Modell der eingemessenen Bereiche. Anhand von diesem Modell konnten Simulationsmodelle aufgebaut, Vorrichtungen im Catia nachmodelliert oder nur Einzelbereiche geändert werden.









Dach Geoframer mit drei ineinander verschachtelte Rahmen für Hubbewegungen in Y- und Z-Richtung (Pneumatisch-Mechanische Betätigung der Hubbewegungen, Gewicht einschließlich Bauteil ca. 350 kg).

